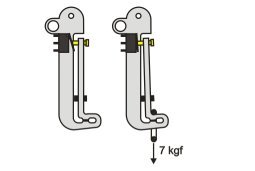
The hook itself is a single piece cut from a plate of 3mm 7075 alloy. Different regions of this part act as the main hook structure, the line tension sensor, movement limiter and a movement amplifying lever. The general principle of this hook is that the narrow metal pillar at the bottom rear of the hook is the tension sensor. Its dimensions are critical. It bends as the line tension increases, allowing to short lever above it which carries the tow ring to deflect downwards. Stops are formed toward the front of this lever that limit its deflection. The gap between them at zero tension is critical because its width both limits movement at the top of the amplifying lever and prevents the tension sensor from being overloaded and permanently deformed. Finally, because the movement at the front of the short lever is small, an amplifying lever runs up the rear of the hook. Its purpose is to amplify the initial tiny movement enough to reliably operate a sensor.
The tension sensing device is a microswitch, which is mounted on the hook body and operated by fore and aft movement of the top of the lever. The unlatch tension is set by a screw adjustable stop at the top of the lever.
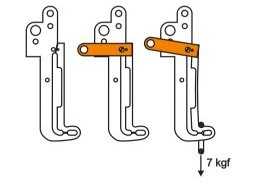
The tension sensing device is a Hall Effect sensor mounted on the hook carrier. The advantages of mounting it on the hook carrier rather the main hook structure are that a longer amplifying lever can be used and that the wires from the Hall Effect sensor do not flex as the hook swings forward and aft during the tow.
The part of the hook running vertically up the back of the hook's main structure merely transmits the small movement up to a separate amplifying lever, shown in orange. The transmission member has a middle region that is thinner when measured front to rear. This acts as a leaf spring, which cooperates with the spring element at the tip of the hook (behind the latch). The tip of the hook will be less prone to plastic deformation of the aluminium and the total spring material (vertical leaf spring and tip of hook) can stay well within its elastic boundaries. The thinned vertical part will also allow some horizontal movement at the connection point with the movement amplifying lever as it rotates.
The amplifying lever is pivoted very close to the point where it is attached to the tramsmission member by a small steel pin and carries a small magnet on its far end. The front of the amplifier moves several mm vertically upward as line tension is applied. At zero tension the magnet is clear of the Hall Effect sensor. As tension is applied the magnet is moved upward and over the Hall Effect sensor to change its state.
This hook is designed to use a small servo to control the rudder. The fore/aft hook position is sensed by a microswitch or a Hall Effect sensor mounted on the lower part of the hook carrier. If a microswitch is used, its operating lever rests on the front of the hook body near its bottom. Similarly, the small magnet for a Hall Effect sensor is mounted on a carrier bolted to the hook body near its base and arranged so the magnet is over the Hall Effect sensor when the hook is forward and moved away from it when the hook is back.
The hook's movement can be quite small, which adds to controllability and stability on tow. Recalling that there is no rudder spring to move the hook back, it is necessary to fit a small leaf or scissor spring between the hook carrier and the hook to guarantee positive rearward movement when the line goes slack. A section of mainspring from a Tomy timer is ideal.